Andrea F. Daniele
Chief Technology Officer • Robotics Engineer • Computer Scientist
Experience

|
Chief Technology Officer
Nov. 2022 - present
I took the position of CTO at Duckietown, where I lead the design and development of all new Duckietown robots and software products.
Boston - MA - USA
|
|
|
|
|
Lead UX Software Engineer
Jan. 2021 - Nov. 2022
Officially joined the Duckietown Team as Lead UX Software Engineer. I lead the effort of improving and developing new software modules aimed at improving the user experience (UX) on the Duckietown robots.
Zürich, Switzerland
|
Software Engineer Intern
Jan. 2019 - May 2019
During a 4-months internship as a Software Engineer in the Simulation Team at drive.ai, I worked on the problem of generating behaviors for dynamic simulated agents using semantically rich graphs computed from annotated HD maps.
Mountain View - CA - USA
|
|
|
|
|
Teaching Assistant
Sep. 2017 - Dec. 2017
Teaching Assistant for the course 'Self-driving Vehicles: Models and Algorithms for Autonomy', colloquially known as Duckietown (a robotics education and outreach effort).
Toyota Technological Institute at Chicago
Chicago - IL - USA
|
|
Visiting Student
Jan. 2016 - Aug. 2016
Research in natural language generation in the context of providing indoor route instructions.
Toyota Technological Institute at Chicago
Chicago - IL - USA
|
|
|
|
|
Web Developer
Aug. 2013 - Jan. 2016
Developed and implemented Web-based applications, websites, web-APIs, and interactive applications for desktop environments and mobile devices.
Cloud4Service.net
Petilia Policastro - KR - Italy
|

|
Education
|
|
|
Ph.D. in Computer Science
Sep. 2016 - Sep. 2023
Toyota Technological Institute at Chicago
Chicago - IL - USA
|
|
|
|
|
M.S. in Computer Science
Sep. 2016 - Sep. 2019
Toyota Technological Institute at Chicago
Chicago - IL - USA
|
|
M.S. in Artificial Intelligence and Robotics
Oct. 2013 - Dec. 2016
University of Rome - La Sapienza
Rome - RM - Italy
|
|
|
|
|
B.S. in Computer Engineering
Oct. 2009 - Jul. 2013
University of Calabria - UNICAL
Rende - CS - Italy
|
|
|
Projects & Events

|
|
Arctic Code Vault
The cold storage that will last 1,000 years
|
Some of my open-source contributions were selected for archival in the
Arctic World Archive (AWA),
an archival facility designed to preserve data for 1,000 years.
A total of 186 reels of film were stored in a steel-walled container, inside a sealed chamber,
within a decommissioned coal mine, buried deep into the permafrost of the Svalbard archipelago,
in Norway. Internationally recognized as a demilitarized zone, Svalbard is the world’s
northernmost town and one of the most remote and geopolitically stable human habitations on Earth.

|
|
SHARC: SHared Autonomy for Remote Collaboration at WHOI
August 2021 - October 2021
|
I worked on the development of "SHARC: SHared Autonomy for Remote Collaboration"
at the Woods Hole Oceanographic Institution.
SHARC is a multi‑modal interface that enables remote scientists to perform high‑level tasks
using an underwater manipulator, while deferring low‑level control to the robot.
We successfully deployed and tested SHARC during the
OECI Technology Demonstration: Nereid Under Ice (NUI) Vehicle + Mesobot
expedition aboard E/V Nautilus.

|
|
March 2021 - August 2021
|
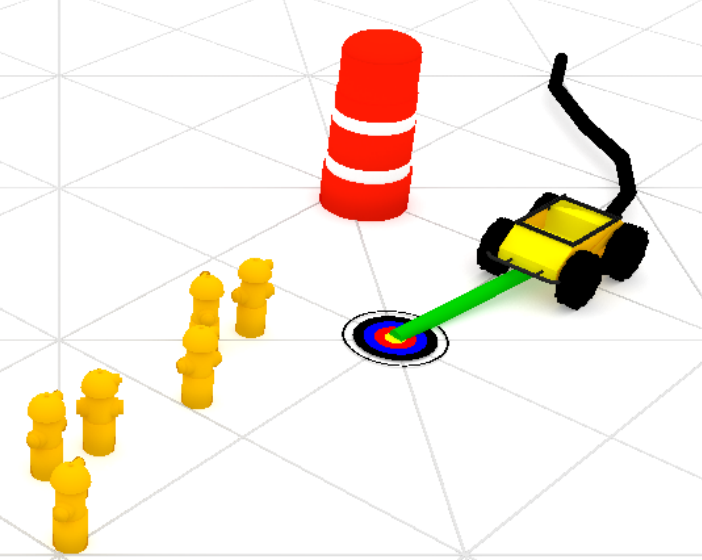
I co-organized the first hardware based massive online open course (MOOC)
in AI and robotics, free on edX.
Aimed at teaching autonomy hands-on by making robots that can take their
own decisions and accomplish broadly defined tasks.
The course guides learners step-by-step from the theory, to the
implementation, to the deployment in simulation as well as on real
robots (Duckiebots).

|
|
Internship at drive.ai - Software Engineer - Simulation Team
January 2019 - May 2019
|
Leveraging static annotations and HD maps, we created a semantically rich lane-level graph,
that simulated agents can use to navigate the map. This lane graph is comprised of three layers:
topological, metrical, and semantic.
Topological and metrical layers were extracted from HD maps and static annotations,
while the semantic layer was constructed from annotations only.

|
|
Workshop on Models and Representations for Natural Human-Robot Communication at the RSS18 Conference
June 2018
|

|
|
UR5-equipped Robot playing Checkers, 2018 National Robotics Week at MSI
April 2018
|
Under the supervision of my adviser
Prof. Matthew Walter,
I and other colleagues
showed our UR5-equipped Husky A200 robot safely playing Checkers against human
opponents at the Museum of Science and Industry
in Chicago for the 2018 National Robotics Week exhibit. This robot is developed in the
RIPL lab at
TTI-Chicago.

|
|
Duckietown 2017
September 2017
|

|
|
Husky A200 robot for the National Robotics Week at the MSI-Chicago
April 2017
|
Under the supervision of my adviser
Prof. Matthew Walter,
I and other colleagues
showed our Husky A200 robot at the Museum of Science and Industry in Chicago
for the National Robotics Week. This robot is developed in the
RIPL lab at
TTI-Chicago as part of the
Robotics Collaborative Technology Alliance (RCTA)
research program. CBS 2’s Vince Gerasole interviewed me on that occasion.

|
|
NLIGEN - Natural Language Instruction Generation
January 2016 - September 2016
|
Under the supervision of my adviser
Prof. Matthew Walter,
I developed a model that enables
robots to generate natural language instructions that
allow humans to navigate a priori unknown environments.
The model first decides which information to share with the user
according to their preferences, then “translates” this information
into a natural language instruction.
Publications
Language Understanding for Field and Service Robots in a Priori Unknown Environments.
Matthew R Walter, Siddharth Patki, Andrea F Daniele, Ethan Fahnestock, Felix Duvallet, Sachithra Hemachandra, Jean Oh, Anthony Stentz, Nicholas Roy, and Thomas M. Howard.
Journal of Field Robotics (IJFR 2021), 2021, .
|
|
|
Integrated Benchmarking and Design for Reproducible and Accessible Evaluation of Robotic Agents.
Jacopo Tani, Andrea F. Daniele, Gianmarco Bernasconi, Amaury Camus, Aleksandar Petrov, Anthony Courchesne, Bhairav Mehta, Rohit Suri, Tomasz Zaluska, Matthew R. Walter, Emilio Frazzoli, Liam Paull, and Andrea Censi.
In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS 2020), July 2020, .
|
|
|
DIODE: A Dense Indoor and Outdoor DEpth Dataset.
Igor Vasiljevic, Nick Kolkin, Shanyi Zhang, Ruotian Luo, Haochen Wang, Falcon Z. Dai, Andrea F. Daniele, Mohammadreza Mostajabi, Steven Basart, Matthew R. Walter, and Gregory Shakhnarovich.
CoRR volume abs/1908.00463, August 2019, .
|
|
|
Inferring Compact Representations for Efficient Natural Language Understanding of Robot Instructions.
Siddharth Patki, Andrea F. Daniele, Matthew R. Walter, and Thomas M. Howard.
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2019, May 2019, Montréal, Canada.
|
|
|
The AI Driving Olympics at NeurIPS 2018.
Julian Zilly, Jacopo Tani, Breandan Considine, Bhairav Mehta, Andrea F. Daniele, Manfred Diaz, Gianmarco Bernasconi, Claudio Ruch, Jan Hakenberg, Florian Golemo, A. Kirsten Bowser, Matthew R. Walter, Ruslan Hristov, Sunil Mallya, Emilio Frazzoli, Andrea Censi, and Liam Paull.
arXiv:1903.02503, March 2019, .
|
|
|
A Multiview Approach to Learning Articulated Motion Models.
Andrea F. Daniele, Thomas M. Howard, and Matthew R. Walter.
In Proceedings of the International Symposium of Robotics Research (ISRR), 2017, December 2017, Puerto Varas, Chile.
|
|
|
Navigational Instruction Generation as Inverse Reinforcement Learning with Neural Machine Translation.
Andrea F. Daniele, Mohit Bansal, and Matthew R. Walter.
In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction (HRI), March 2017, Vienna, Austria.
|
|
|
Natural Language Generation in the Context of Providing Indoor Route Instructions.
Andrea F. Daniele, Mohit Bansal, and Matthew R. Walter.
In Proceedings Robotics: Science and Systems Workshop on Model Learning for Human-Robot Communication, May 2016, Ann Arbor, MI, USA.
|
|
|
|
|